
Readme
LocateAnything-3B — Visual Grounding (imagem + vídeo)
Wrapper Cog do nvidia/LocateAnything-3B — um modelo de visão-linguagem (MoonViT + Qwen2.5-3B + Parallel Box Decoding) para localização de objetos a partir de linguagem natural.
Dada uma imagem ou vídeo + uma instrução em texto, devolve rótulos com bounding boxes e points, além da mídia anotada (PNG para imagem, MP4 H.264 para vídeo).
Forte em detecção densa em cena cheia (contar centenas/milhares de objetos numa única imagem), referring grounding, GUI grounding, OCR/layout e pointing.
🟢 Em palavras simples (comece por aqui)
Pensa nele como um “caça-objetos por comando de texto”:
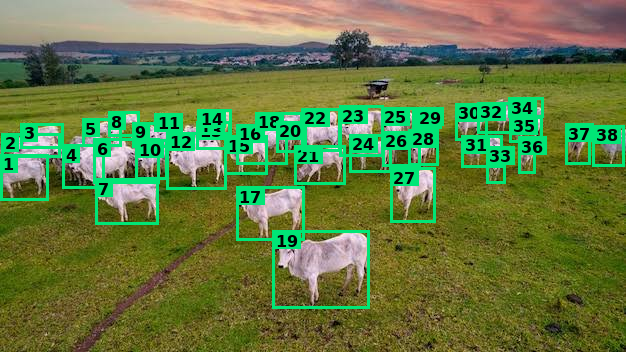
Você mostra uma foto (ou um vídeo) e escreve, em inglês, o que procurar — tipo “Detect all the cars” (detecte todos os carros). Ele devolve a mesma imagem com quadradinhos verdes em volta de cada objeto encontrado, e te diz quantos achou.
Serve pra coisas como: - Contar — quantas cabeças de gado, ovos, pessoas, peças tem nesta foto? - Achar — onde está a placa de saída / o carro vermelho / o produto X? - Marcar em vídeo — desenhar caixas nos objetos ao longo de um vídeo.
Você não precisa mexer em quase nada: joga a foto, escreve o que quer em inglês, e pronto. Os “controles avançados” abaixo só servem pra ajustar casos específicos.
Dois modelos (escolha o hardware)
| Modelo | Hardware | Quando usar |
|---|---|---|
csviverdeia/locateanything-3b-h100 |
H100 | Padrão para tudo. ~2,4× mais rápido; vídeo ~40% mais barato/job; imagem custa praticamente igual ao L40S porém mais rápida. |
csviverdeia/locateanything-3b |
L40S | Fallback de disponibilidade (H100 é GPU disputada). Mesmo código. |
Recomendação: use o H100 como principal. Mantenha o L40S como reserva — você só paga quando roda.
Inputs
| Input | Tipo | Default | Faixa | Descrição |
|---|---|---|---|---|
image |
file | — | — | Imagem RGB. Use image ou video (o modelo detecta o tipo do arquivo sozinho). |
video |
file | — | — | Vídeo. É amostrado em frames e detectado quadro-a-quadro. |
prompt |
str | “Detect all the main objects…” | — | O que localizar. Ver Dicas de prompt. |
generation_mode |
enum | hybrid |
hybrid / ar / mtp | Modo de decodificação. hybrid equilibra velocidade e precisão. |
tracker |
enum | none |
none / sort / reid | [vídeo] none = só caixas, sem ID (estilo NVIDIA). sort = IDs por movimento (Kalman+Hungarian). reid = SORT + aparência (ResNet18). |
detect_fps |
float | 3.0 | 0.5–10 | [vídeo] Detecções por segundo. Mais alto = acompanha melhor o movimento, mais lento/caro. |
max_detect_frames |
int | 24 | 1–120 | [vídeo] Teto de frames detectados (distribuídos no vídeo) p/ limitar custo. |
max_new_tokens |
int | 2048 | 64–8192 | Limite de tokens de saída. Suba para cenas MUITO densas (centenas de boxes). |
temperature |
float | 0.2 | 0–2 | 0 = determinístico (recomendado p/ contagem; reduz falso-positivo). |
top_p |
float | 0.9 | 0–1 | Amostragem nucleus. |
repetition_penalty |
float | 1.1 | 1–2 | Evita repetição. |
🧩 Entendendo os controles (em português claro)
image/video— o arquivo que você sobe. Tanto faz em qual campo: se for vídeo, ele entende sozinho. Use um dos dois.prompt— a frase (em inglês) dizendo o que procurar. É o controle mais importante. Ex.:"Detect all the people"(ache todas as pessoas). Seja específico.temperature— o “quão criativo” ele é. Pra contar, deixe0(mais preciso, não inventa). Valores altos = mais chute.max_new_tokens— quanto ele “pode falar”. Cada objeto gasta um pouco. Se a foto tem muitos objetos (centenas) e a contagem parece cortada, aumente (ex.: 8192).detect_fps(só vídeo) — quantas vezes por segundo ele olha o vídeo. Objeto rápido (carro, esteira) → número alto (5–10), pra acompanhar. Objeto lento → 2–3 já basta. Quanto maior, mais lento e mais caro.max_detect_frames(só vídeo) — um limite de segurança de quantos quadros ele analisa (pra não ficar caro/demorado em vídeo longo). Se quiser mais precisão num vídeo, aumente.tracker(só vídeo) — como ele lida com a identidade dos objetos:none(padrão) → só desenha as caixas, sem número. É o mais limpo e o que a NVIDIA mostra. Use este na dúvida.sort→ coloca um número fixo (#1, #2…) em cada objeto e tenta manter ao longo do vídeo. Bom pra objetos diferentes e movimento normal.reid→ igual aosort, mas também “lembra a aparência” — segura melhor o número quando o objeto some atrás de algo e volta. Mais lento. Bom pra cruzamentos/oclusão.generation_mode/top_p/repetition_penalty— controles finos; deixe no padrão a não ser que você saiba o que está fazendo.
🍳 Receitas — qual configuração usar em cada situação
| Situação | Configuração recomendada |
|---|---|
| Contar objetos numa foto (gado, ovos, peças) | image + prompt: "Detect every individual X. Output one tight box per X." + temperature: 0 + max_new_tokens: 8192 |
| Achar UMA coisa específica numa foto | image + prompt: "Detect the red car" (descreva bem) |
| Marcar um ponto em cada objeto (não caixa) | image + prompt: "Point to each person." |
| Vídeo bonito e fluido (estilo NVIDIA, sem números) | video + tracker: none + detect_fps: 5 (ou mais) + max_detect_frames: 60 |
| Vídeo com objetos numerados (poucos, distintos) | video + tracker: sort + detect_fps: 4 |
| Vídeo com cruzamento/oclusão (objetos somem e voltam) | video + tracker: reid + detect_fps: 4 |
| Objetos rápidos (trânsito, esteira) | suba o detect_fps (8–10) e o max_detect_frames proporcional |
| Vídeo longo, quer economizar | detect_fps: 2 + max_detect_frames: 24 (menos quadros = mais barato) |
| A contagem veio “cortada” (muitos objetos) | aumente max_new_tokens (8192) |
| Ele inventou caixas onde não tem nada | temperature: 0 |
Regra de ouro: pra contar, use foto (não vídeo) com
temperature: 0. Pra mostrar movimento num vídeo, usetracker: none. O resto é ajuste fino.
Output
{
"detections": "<JSON: modality, answer, coords, boxes[], points[], ...>",
"num_detections": 36,
"image": "https://.../annotated.png", // só para input de imagem
"video": "https://.../annotated.mp4" // só para input de vídeo (H.264)
}
- Imagem:
boxes/pointsem pixels;imagetraz a foto com as caixas numeradas. - Vídeo:
videotraz o MP4 anotado;detectionstraz o log por frame. No modonone,num_detections= pico de objetos simultâneos; emsort/reid= objetos únicos rastreados.
Casos de uso
| Objetivo | Como |
|---|---|
| Contar objetos (ovos, gado, pacotes, peças) | 1 imagem boa + prompt de detecção densa. É o forte do modelo. |
| Achar algo específico | prompt = “Detect the red car” / “Locate the exit sign”. |
| Pointing (1 ponto por objeto) | prompt = “Point to each person.” → sai em points. |
| Detecção em vídeo (visualizar) | video + tracker: none (caixas limpas, sem renumeração). |
| Rastrear IDs em vídeo | tracker: sort (objetos distintos) ou reid (sobrevive a oclusão). |
Exemplos
Python (imagem)
import replicate
out = replicate.run(
"csviverdeia/locateanything-3b-h100",
input={
"image": open("herd.jpg", "rb"),
"prompt": "Detect every individual animal. Output one tight box per animal.",
"temperature": 0,
"max_new_tokens": 8192,
},
)
print(out["num_detections"], out["image"])
Python (vídeo, estilo NVIDIA — só caixas)
out = replicate.run(
"csviverdeia/locateanything-3b-h100",
input={
"video": open("street.mp4", "rb"),
"prompt": "Detect all the cars.",
"tracker": "none",
"detect_fps": 5, # mais alto = mais fluido
"max_detect_frames": 60, # suba p/ vídeos longos
},
)
print(out["video"])
curl (imagem via base64)
curl -s -X POST https://api.replicate.com/v1/predictions \
-H "Authorization: Bearer $REPLICATE_API_TOKEN" -H "Content-Type: application/json" \
-d '{"version":"<VERSION>","input":{"image":"data:image/jpeg;base64,'"$(base64 -w0 img.jpg)"'","prompt":"Detect all cows.","temperature":0}}'
Dicas de prompt
- Detecção: “Detect every individual X. Output one tight bounding box per X.”
- Contagem densa: seja explícito em “cada/individual” e use
temperature: 0+max_new_tokensalto. - Pointing: “Point to each X.” (saída vira
points). - Referring: “Locate all the instances that match: <descrição>.”
- Objeto ausente → o modelo pode alucinar 1–2 caixas;
temperature: 0reduz.
Dicas de vídeo
- Velocidade do objeto manda no
detect_fps: objeto rápido (esteira, trânsito) → suba para 5–10. Lento → 2–3 basta. max_detect_framesprecisa ser alto o bastante p/ não sufocar odetect_fps(senão a detecção fica rara e as caixas “pulam”).- Para o resultado mais fluido (estilo NVIDIA):
tracker: none+detect_fps≈ fps do vídeo. Custa mais (uma inferência por frame) — por isso o H100. - Contar throughput em esteira não é o forte: o modelo é detector por frame, não tracker industrial. Para isso, prefira contagem por imagem ou um pipeline dedicado (YOLO+ByteTrack).
Custo (compute, modelo quente)
| L40S | H100 | |
|---|---|---|
| Imagem | ~$0.0016 | ~$0.0017 |
| Vídeo (por frame detectado) | ~$0.0044 | ~$0.0026 |
| Vídeo 5s (detect_fps 3) | ~$0.08 | ~$0.05 |
| Vídeo 10s todo-frame (300 fr) | ~$1.32 | ~$0.79 |
Custo de vídeo ≈ frames_detectados × (0.0044 L40S / 0.0026 H100), onde frames = duração × detect_fps (limitado por max_detect_frames). O 1º hit após ocioso tem cold-start (não incluído acima).
Limitações (honestas)
- Teto de resolução: o modelo reduz internamente imagens acima de ~803k px (~896×896) (
in_token_limit=4096). Objetos muito pequenos/ao fundo podem sumir mesmo enviando foto grande. (Para esses casos: tiling — não incluído neste wrapper.) - Vídeo é detecção por frame, não tracking nativo. Cenas densas/rápidas (esteira) causam IDs instáveis em
sort/reid— usenone. - Alucinação: pode inventar 1–2 caixas quando o objeto pedido não existe.
- Licença: o modelo base é NVIDIA License (uso não-comercial). Revise antes de produção.
Crédito
Modelo: nvidia/LocateAnything-3B. Wrapper Cog por csviverdeia.