

Readme
Depth Anything V3 — Metric Large
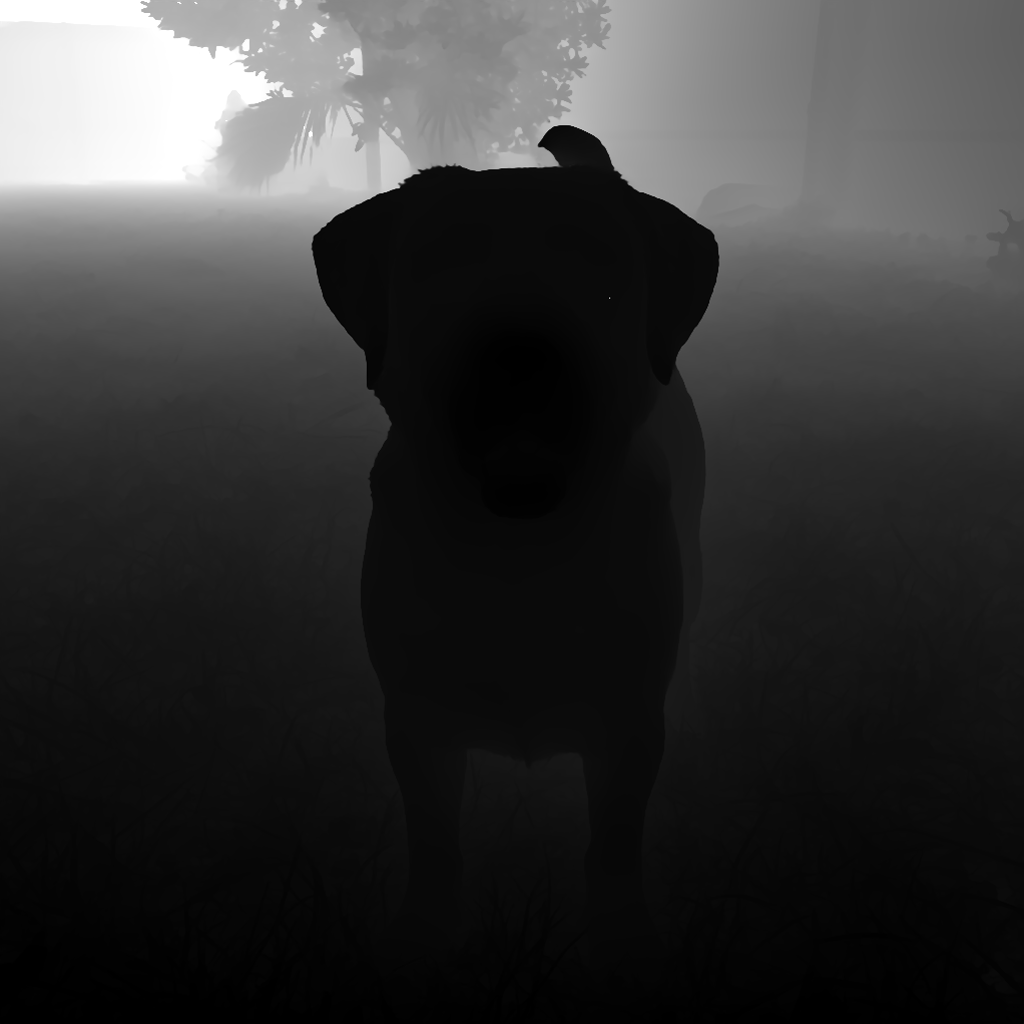
Estimate real-world depth in meters from a single image. Returns a 16-bit PNG depth map with metric scale metadata, ready for 3D reconstruction, parallax effects, robotics, or any application that needs actual distances (not just relative ordering).
Based on Depth Anything 3 (DA3METRIC-LARGE) by ByteDance. Apache 2.0 license.
Why this model?
| Feature | This model | Typical DA3 wrappers |
|---|---|---|
| Output precision | 16-bit PNG (65,535 levels) | 8-bit (256 levels) |
| Metric depth | Real distances in meters with decode formula | Relative depth only |
| Inference resolution | Up to 1120px (reduces ViT grid artifacts) | Default 504px (visible grid) |
| EXIF handling | Auto-normalizes orientation before inference | Often ignored (rotated outputs) |
| Raw float32 output | Optional NPZ with full-precision metric depth | Not available |
| Stable API contract | Versioned output schema (da3-metric/v1) |
Unversioned |
Quick start
Python
import replicate
output = replicate.run(
"wolfire/depth-anything-v3-metric-large",
input={"image": "https://example.com/photo.jpg"},
)
# Output includes metric metadata
print(f"Depth range: {output['depth_min_m']:.2f}m — {output['depth_max_m']:.2f}m")
print(f"Depth map URL: {output['depth_png']}")
{kind=link}
JavaScript
import Replicate from "replicate";
const replicate = new Replicate();
const output = await replicate.run("wolfire/depth-anything-v3-metric-large", {
input: { image: "https://example.com/photo.jpg" },
});
console.log(`Depth range: ${output.depth_min_m}m — ${output.depth_max_m}m`);
console.log(`Depth map: ${output.depth_png}`);
cURL
curl -sS -X POST "https://api.replicate.com/v1/models/wolfire/depth-anything-v3-metric-large/predictions" \
-H "Authorization: Bearer $REPLICATE_API_TOKEN" \
-H "Content-Type: application/json" \
-d '{"input": {"image": "https://example.com/photo.jpg"}}'
Decoding the 16-bit depth map
The output depth_png is a 16-bit grayscale PNG. Convert pixel values back to meters using the scale_m_per_unit and offset_m fields from the output:
import numpy as np
from PIL import Image
arr = np.array(Image.open("depth.png"), dtype=np.uint16)
depth_meters = arr.astype(np.float32) * output["scale_m_per_unit"] + output["offset_m"]
The depth_min_m and depth_max_m fields give the 1st/99th percentile depth range used for encoding, so you know the effective metric bounds without decoding.
Inputs
| Parameter | Type | Default | Description |
|---|---|---|---|
image |
file/URL | (required) | Input image |
focal_length_px |
float | 0 |
Focal length in pixels. 0 = auto-estimate using 60-degree HFOV heuristic |
max_process_res |
int | 0 |
Cap inference resolution (0 = server default of 1120px). Higher = sharper depth but more VRAM |
return_raw_depth |
bool | false |
Include depth_npz with float32 metric depth (no quantization loss) |
include_base64 |
bool | true |
Include depth_png_base64 for inline transport (no extra download) |
Outputs
| Field | Description |
|---|---|
depth_png |
16-bit grayscale PNG depth map (hosted URL) |
image |
Alias of depth_png (for Replicate UI preview cards) |
depth_npz |
Float32 metric depth in NPZ format (when return_raw_depth=true) |
depth_png_base64 |
Base64-encoded 16-bit PNG (when include_base64=true) |
depth_min_m |
Near depth bound in meters (1st percentile) |
depth_max_m |
Far depth bound in meters (99th percentile) |
scale_m_per_unit |
Multiply u16 pixel value by this to get meters |
offset_m |
Add this after scaling to get meters |
focal_length_used |
Focal length used for metric conversion (pixels) |
process_res_used |
Actual inference resolution used |
contract_version |
Output schema version (da3-metric/v1) |
model_name |
DA3METRIC-LARGE |
model_ref |
HuggingFace model reference |
model_commit |
Pinned DA3 source commit for reproducibility |
Use cases
- 3D photo effects / parallax — generate depth-based parallax from a single photo
- Robotics & SLAM — metric depth for obstacle avoidance and mapping
- AR/VR content — depth-aware compositing and occlusion
- Visual effects — depth-of-field, fog, and atmospheric perspective
- Point cloud generation — combine with camera intrinsics for 3D reconstruction
License
Apache 2.0 — the underlying DA3 model and this wrapper are both Apache-licensed.
Citation
@article{depth_anything_3,
title={Depth Anything 3: Recovering the Visual Space from Any Views},
author={Lin, Haotong and Chen, Yilun and Liew, Jun Hao and Luo, Jiashi and others},
journal={arXiv preprint arXiv:2511.10647},
year={2025}
}
Model created