


Readme
About the model
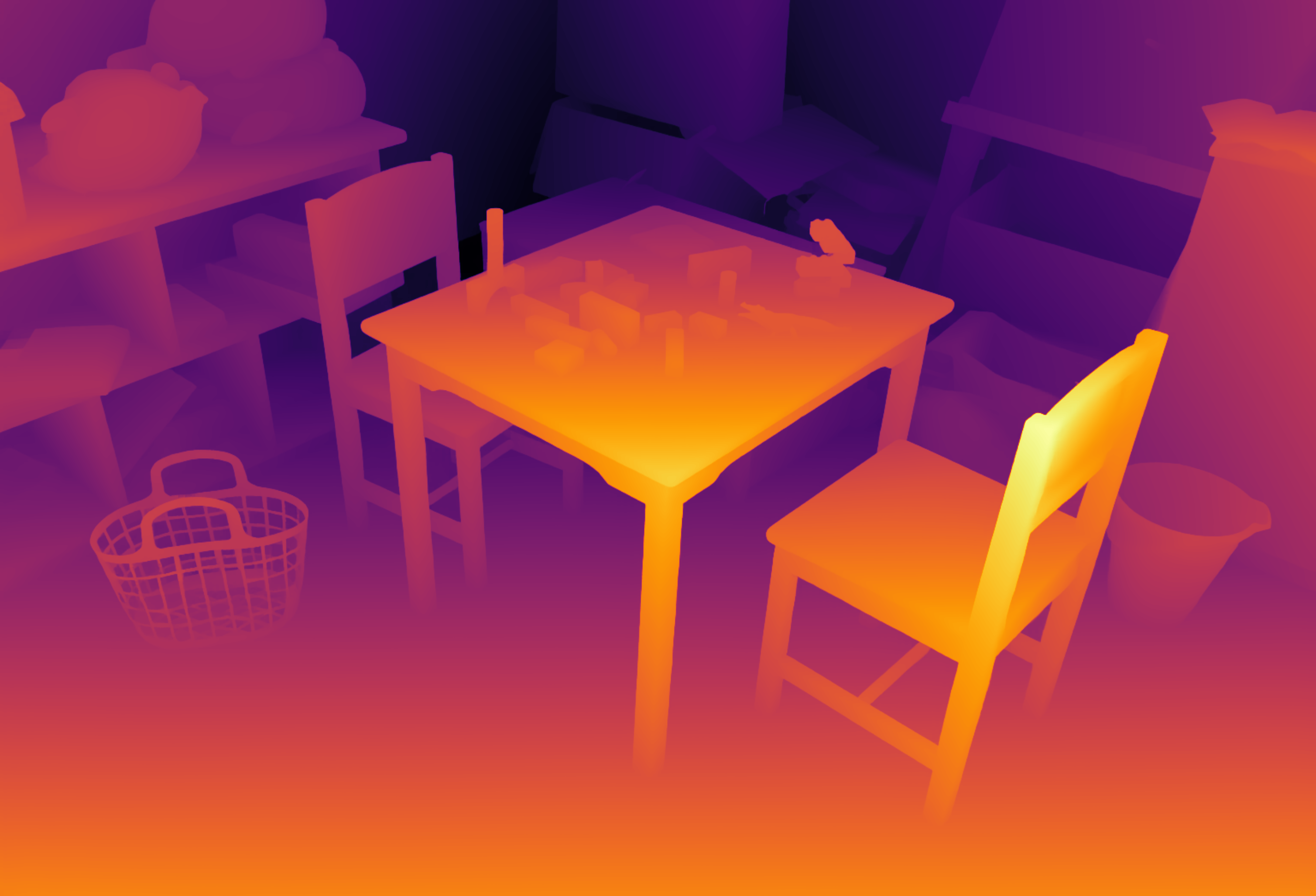
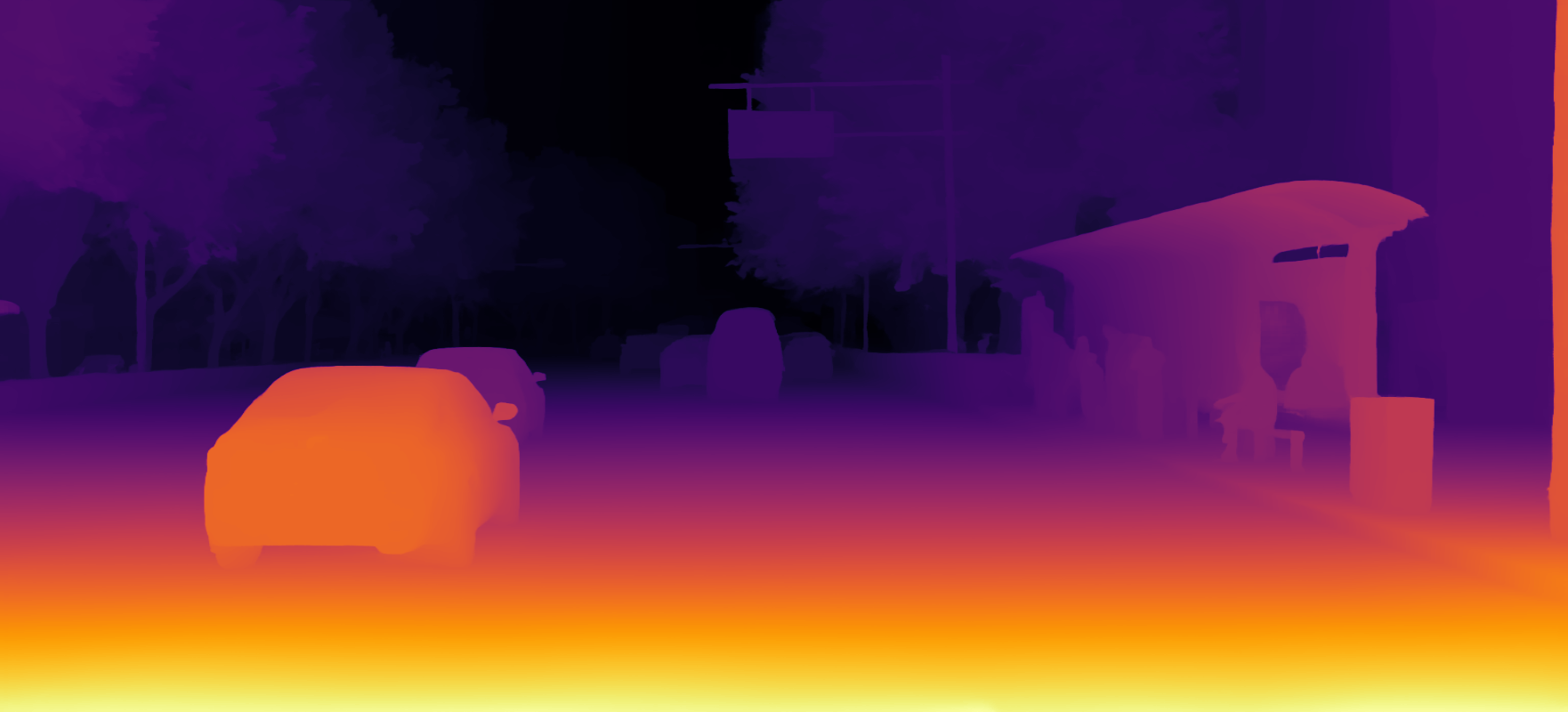
Stereo matching is a classical way to extract a depth estimation from a pair of rectified images: Pixel descriptors that appear in both images are matched and depth is calculated by the their location disparity.
This model trains an end to end neural network that processes a pair of images and uses an adaptive correlation module to register locations in multi-scale features space of the network. The output is a highly accurate depth map of the left image.
[CVPR 2022] Practical Stereo Matching via Cascaded Recurrent Network with Adaptive Correlation
Practical Stereo Matching via Cascaded Recurrent Network with Adaptive Correlation Jiankun Li, Peisen Wang, Pengfei Xiong, Tao Cai, Ziwei Yan, Lei Yang, Jiangyu Liu, Haoqiang Fan, Shuaicheng Liu CVPR 2022 (Oral)

Citation
If you find the code or datasets helpful in your research, please cite:
@inproceedings{li2022practical,
title={Practical stereo matching via cascaded recurrent network with adaptive correlation},
author={Li, Jiankun and Wang, Peisen and Xiong, Pengfei and Cai, Tao and Yan, Ziwei and Yang, Lei and Liu, Jiangyu and Fan, Haoqiang and Liu, Shuaicheng},
booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition},
pages={16263--16272},
year={2022}
}
Model created